井原市で天の川 ― 2025/06/21 12:47

星が綺麗だというので、井原市で天の川を撮ってみる。
仕事のついで・・・なので、装備は軽量。
nex5n改造カメラに、21mmと135mmのオールドレンズ、ミニ三脚にナノトラッカーを持ち込んだ。(ホントは改造したばかりの6Dと、xp14mm、samyang135/f2を持ち込みたかったのだけど)
市内とはいえsqmは21と、実家には僅かに劣るけど良い空です。
但し、南方向は福山の光害が凄いです・・・ 天文台付近まで遠征すれば、きっと文句のつけどころのない良い空なのでしょう・・・
まずは、ホテルの裏庭で撮ってみる。
蛍が飛んでいたりするので、結構自然豊かな場所です。
マミヤセコールsxは絞り開放から解像度が良いです。
カメラ固定で星が点像に映って、光害に負けないギリギリな設定です。
auto mamiya/sekor sx 21mm f4/f4 15sec.x10 iso3200 nex5n改
仕事のついで・・・なので、装備は軽量。
nex5n改造カメラに、21mmと135mmのオールドレンズ、ミニ三脚にナノトラッカーを持ち込んだ。(ホントは改造したばかりの6Dと、xp14mm、samyang135/f2を持ち込みたかったのだけど)
市内とはいえsqmは21と、実家には僅かに劣るけど良い空です。
但し、南方向は福山の光害が凄いです・・・ 天文台付近まで遠征すれば、きっと文句のつけどころのない良い空なのでしょう・・・
まずは、ホテルの裏庭で撮ってみる。
蛍が飛んでいたりするので、結構自然豊かな場所です。
マミヤセコールsxは絞り開放から解像度が良いです。
カメラ固定で星が点像に映って、光害に負けないギリギリな設定です。
auto mamiya/sekor sx 21mm f4/f4 15sec.x10 iso3200 nex5n改
美星天文台 101cm望遠鏡 ― 2025/06/20 22:49
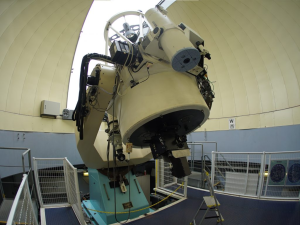
出張で井原市へ、良い機会なので美星天文台に行ってみました。101cm望遠鏡を覗かせて貰えます。
生憎の薄曇りでしたが、101cmの口径で300倍、300倍なのにめちゃめちゃ明るく見えます! 自分の25cmや、観望会で見せて貰える11インチとは世界が違う・・・ 自分の望遠鏡で撮る写真が、眼視で見える感じかな? いゃあ、圧倒的です!
ピーカンに日に、も一回行ってみたい・・・
生憎の薄曇りでしたが、101cmの口径で300倍、300倍なのにめちゃめちゃ明るく見えます! 自分の25cmや、観望会で見せて貰える11インチとは世界が違う・・・ 自分の望遠鏡で撮る写真が、眼視で見える感じかな? いゃあ、圧倒的です!
ピーカンに日に、も一回行ってみたい・・・
seestar s50でM20 ― 2025/06/06 22:39

月を撮った後に、撮影プランを使って自動撮影・・・
結果的に、撮れたのはアンタレスとm20だけでした、m16、m27もプランに入れたのだけど写っていませんでした? ひょっとして曇ってしまい撮影できなかったのかな? と言うか、そういう履歴が残らない。
左はss50の中に記録されていた画像をsiril、graxpert、gimpで何時もの手順でブログ向けに補正した物、右はスマホに記録されていた画像、強調の仕方が少し違うけど同程度な感じ、ちなみにスマホはDenoiseを掛けるとカラーのザラザラノイズを消せます! ss50の勝ち!かなwww
結果的に、撮れたのはアンタレスとm20だけでした、m16、m27もプランに入れたのだけど写っていませんでした? ひょっとして曇ってしまい撮影できなかったのかな? と言うか、そういう履歴が残らない。
左はss50の中に記録されていた画像をsiril、graxpert、gimpで何時もの手順でブログ向けに補正した物、右はスマホに記録されていた画像、強調の仕方が少し違うけど同程度な感じ、ちなみにスマホはDenoiseを掛けるとカラーのザラザラノイズを消せます! ss50の勝ち!かなwww