スーパーデジ四駆をロボット用のラジコンに・・・ その4 ― 2009/01/18 19:46

配線済みの受信基板は写真の通りです。
74HCT04は空中配線なので、実際にはにテープを巻いて固定&絶縁します。KRR-1に比べ面積比で1.5倍、厚さは半分くらいです。(クリスタル除く)
実働試験を、KRC-1+送信基板+受信基板+rsv3でやってみましたが問題なく動いているようです。
ちなみに、スーパーデジ四駆は定価で6500円、きっと場所によっては格安で手にはいる? 上手く探せば、格安でラジコンシステムが手に入るかもしれません???
74HCT04は空中配線なので、実際にはにテープを巻いて固定&絶縁します。KRR-1に比べ面積比で1.5倍、厚さは半分くらいです。(クリスタル除く)
実働試験を、KRC-1+送信基板+受信基板+rsv3でやってみましたが問題なく動いているようです。
ちなみに、スーパーデジ四駆は定価で6500円、きっと場所によっては格安で手にはいる? 上手く探せば、格安でラジコンシステムが手に入るかもしれません???
スーパーデジ四駆をロボット用のラジコンに・・・ その3 ― 2009/01/18 12:57

今日は受信機編です・・・
1.まず、受信機基板の部品を外します。多分、外さなくても大丈夫だとは思うけど念のため。
2.74HCT14というICを用意します。私はあり合わせの74ACT04を使いましたが、新規に買うならHCTがお勧めです。
3.74HCT04を回路図のように配線して、受信基板の「受信信号取り出し」部と配線します。
4.5VとGND(0V)は受信基板の赤と黒のリードが付いている処に配線しました。
5.RCB3との配線は「OUT」のところが白色(信号)、5Vが赤色、GNDが黒色です。
写真をクリックすると拡大します
完成写真と実験結果は次のスレッドで・・・
1.まず、受信機基板の部品を外します。多分、外さなくても大丈夫だとは思うけど念のため。
2.74HCT14というICを用意します。私はあり合わせの74ACT04を使いましたが、新規に買うならHCTがお勧めです。
3.74HCT04を回路図のように配線して、受信基板の「受信信号取り出し」部と配線します。
4.5VとGND(0V)は受信基板の赤と黒のリードが付いている処に配線しました。
5.RCB3との配線は「OUT」のところが白色(信号)、5Vが赤色、GNDが黒色です。
写真をクリックすると拡大します
完成写真と実験結果は次のスレッドで・・・
スーパーデジ四駆をロボット用のラジコンに・・・ その2 ― 2009/01/14 19:58

昨日の続きです、
送信基板の配線図を描いてみました。参考になるかな?
KRC-1と送信モジュールを繋ぐ配線(コネクタ)の色は以下の通りです。
+5V = 赤色
GND = 黒色
PULSE = 白色
ANT = アンテナ
10KΩ、100KΩ、22KΩx2 の抵抗器も必要です。
写真をクリックすると拡大します。
送信基板を切断したのが右の基板、左はその片割れです。
送信基板の配線図を描いてみました。参考になるかな?
KRC-1と送信モジュールを繋ぐ配線(コネクタ)の色は以下の通りです。
+5V = 赤色
GND = 黒色
PULSE = 白色
ANT = アンテナ
10KΩ、100KΩ、22KΩx2 の抵抗器も必要です。
写真をクリックすると拡大します。
送信基板を切断したのが右の基板、左はその片割れです。
スーパーデジ四駆をロボット用のラジコンに・・・ ― 2009/01/14 00:13

福袋のオマケ、スーパーデジ四駆のAdバンドな送受信機をロボット用に使えないか実験してみました。
写真は、スーパーデジ四駆の送信機EX-5の基板を(トリミングして)KRC-1の中に埋め込んだものです。至近距離で試験してみましたがrsv3は普通に動きます。次は、遠距離でどの程度届くか試験しなくては・・・
受信部も至近距離での試験は終わっていて、受信部とRCB-3を直結すれば動くことを確認しました。双方のレベル(電圧)が異なるので次はコンバータでレベル合わせ回路の追加と、省エネのために不要(ミニ四駆用)回路の削除をしてみます。
ということで、実験レベルでは成功! 次は実用試験にとりかかります。詳細は後日レポートにまとめる予定です。
・・・とりあえず、お約束の第一報、でした。
写真は、スーパーデジ四駆の送信機EX-5の基板を(トリミングして)KRC-1の中に埋め込んだものです。至近距離で試験してみましたがrsv3は普通に動きます。次は、遠距離でどの程度届くか試験しなくては・・・
受信部も至近距離での試験は終わっていて、受信部とRCB-3を直結すれば動くことを確認しました。双方のレベル(電圧)が異なるので次はコンバータでレベル合わせ回路の追加と、省エネのために不要(ミニ四駆用)回路の削除をしてみます。
ということで、実験レベルでは成功! 次は実用試験にとりかかります。詳細は後日レポートにまとめる予定です。
・・・とりあえず、お約束の第一報、でした。
rsv3のFETスイッチ回路 ― 2008/09/23 21:47
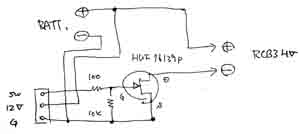
先日、rsv3の電源スイッチであるFETスイッチ回路を破損させてしまったので作り直しました。回路図が無くて困ったので覚書です(^^;)
・BATTはリポ(3S)へ
・RCB3HVはCPUボードへ
・3Pのコネクタは、自作スイッチ回路へ
※3Pコネクタの「SW」に5Vを掛けると電源ONになります。
自作スイッチ回路はPIC12F675で作ったマイコン制御で、プッシュスイッチを1秒長押しで電源ON、0.5秒長押しで電源OFFになります。誤動作防止のため、瞬間押しただけでは何も起きません。
FETは30V/75A 7.5mΩのTO-220パッケージ
・BATTはリポ(3S)へ
・RCB3HVはCPUボードへ
・3Pのコネクタは、自作スイッチ回路へ
※3Pコネクタの「SW」に5Vを掛けると電源ONになります。
自作スイッチ回路はPIC12F675で作ったマイコン制御で、プッシュスイッチを1秒長押しで電源ON、0.5秒長押しで電源OFFになります。誤動作防止のため、瞬間押しただけでは何も起きません。
FETは30V/75A 7.5mΩのTO-220パッケージ
KRG-2 アナログ改造 ― 2008/01/03 11:59

実は、KRG-2が4つも余っているんです(^^;) でも、アナログ出力ジャイロ(KRG-3)は、もっと必要! ということでKRG-2をアナログ出力改造してみました。
パターンカット1箇所、ジャンパ1箇所です。不要なジャンパポストは外してしまいましたが、外さなくても大丈夫です。感度調整ボリュームは無効です。出力は実測で1.5V±1Vでした。投げロボの副生物です(^^;)
画像をクリックすると、少しだけ大きくなります。
パターンカット1箇所、ジャンパ1箇所です。不要なジャンパポストは外してしまいましたが、外さなくても大丈夫です。感度調整ボリュームは無効です。出力は実測で1.5V±1Vでした。投げロボの副生物です(^^;)
画像をクリックすると、少しだけ大きくなります。