ロボサバ21 ― 2014/07/02 21:51
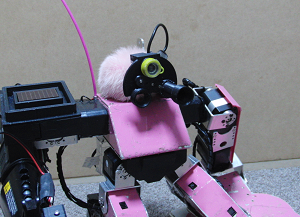
今回のロボでサバゲも「さくら2号」で参加
目玉は、ターレットレンズで移動時と射撃時の視野を切り替えること、視野の切り替えは予想以上に上手くいきました。
ただ、今回は無線カメラの電波状況が悪く、映像が荒れまくっていたw 目の前のベニア板を超えられないのか? 無線カメラのアンテナが悪いのか? 次回は、受信側のアンテナ位置を延長してみようかな?
もう1つの課題は、銃を持つ右手が重くて歩行が曲がることw 今回は積極的に動いてしまったので結果はイマイチでしたw 最後のランブルは動かなかったので成績が良かったww
あと、移動後、スムーズに射撃に入れない! 移動時の画面と射撃時の視野が異なるのと、カメラが銃に付いていないので画面上の何処かにあるレーザーサイトを探さねばならず、とにかくイマイチ!
さて、さくら2号は「わんだほー」仕様に改造されるので、ロボサバはしばらくお休み、robo-oneもあるしね~
目玉は、ターレットレンズで移動時と射撃時の視野を切り替えること、視野の切り替えは予想以上に上手くいきました。
ただ、今回は無線カメラの電波状況が悪く、映像が荒れまくっていたw 目の前のベニア板を超えられないのか? 無線カメラのアンテナが悪いのか? 次回は、受信側のアンテナ位置を延長してみようかな?
もう1つの課題は、銃を持つ右手が重くて歩行が曲がることw 今回は積極的に動いてしまったので結果はイマイチでしたw 最後のランブルは動かなかったので成績が良かったww
あと、移動後、スムーズに射撃に入れない! 移動時の画面と射撃時の視野が異なるのと、カメラが銃に付いていないので画面上の何処かにあるレーザーサイトを探さねばならず、とにかくイマイチ!
さて、さくら2号は「わんだほー」仕様に改造されるので、ロボサバはしばらくお休み、robo-oneもあるしね~
エンドミルのスピンドルの回転数を上げてみる ― 2014/07/12 15:17
kitmillのスピンドルはサイズの違うプーリにベルト掛けで回転数を3種類に変えられる。φ2mmの時は気にならなかったけど、φ1.5mmだと回転数が遅い感じなので、プーリの位置を変えてみる。
ちなみにデフォルトでは真ん中のプーリ、最速のプーリにすると2倍近く速度があがりそう・・・
結果は、というと・・・ ベルトをゆるめに掛けているせいもあるけど、負荷トルク増えると少しつらそうw とはいえ、おおむね軽快に回って感じで良さそう。ストロボ式の回転計で速度を測ってみたかったけど、行方不明で計測できていません。
明日から久々に上海、色々と難ありw
ちなみにデフォルトでは真ん中のプーリ、最速のプーリにすると2倍近く速度があがりそう・・・
結果は、というと・・・ ベルトをゆるめに掛けているせいもあるけど、負荷トルク増えると少しつらそうw とはいえ、おおむね軽快に回って感じで良さそう。ストロボ式の回転計で速度を測ってみたかったけど、行方不明で計測できていません。
明日から久々に上海、色々と難ありw
帰れない・・・ ― 2014/07/19 06:37
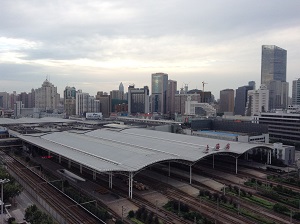
ホテルの窓から見た、早朝の上海駅
出かける時から、なんか嫌な予感はしていたのだが
結局、予定日の18日に帰れず、わんだほーに出られない。
洗濯物は乾かないし、散々w
出かける時から、なんか嫌な予感はしていたのだが
結局、予定日の18日に帰れず、わんだほーに出られない。
洗濯物は乾かないし、散々w